Abstract
Vehicle slipping may cause an accident while driving. However, professional drivers usually perform high side-slip angle maneuvers, such as drifting to minimize lap time or avoid obstacles. Tracking the desired trajectory while maintaining drift is a challenging task due to the complexity of the vehicle model. In this paper, we first solve a series of minimum-time cornering problems under different initial conditions. The results show that an aggressive cornering can be divided into three segments, including the entry corner stage, the drifting stage, and the exiting stage. We then propose a complete trajectory planning and motion control framework to conduct the drift cornering maneuver. The trajectory planner calculates the speed profile and then updates the initial path by optimizing curvature. A switch-mode control system is proposed for the above three stages to track the reference trajectory, which is based on pure pursuit control and Model Predictive Control (MPC). Finally, we validate the cornering framework by simulation on the Simulink-Carsim software and experiments on a 1/10 scale RC vehicle.
Contributions
1. By solving minimum time cornering problem and ana lyzing the phase portrait of the vehicle model, this paper indicates that an aggressive cornering maneuver can be divided into three stages, that is, the guidance stage before entering the corner, the drift stage with a large sideslip angle, and the exiting stage after cornering.
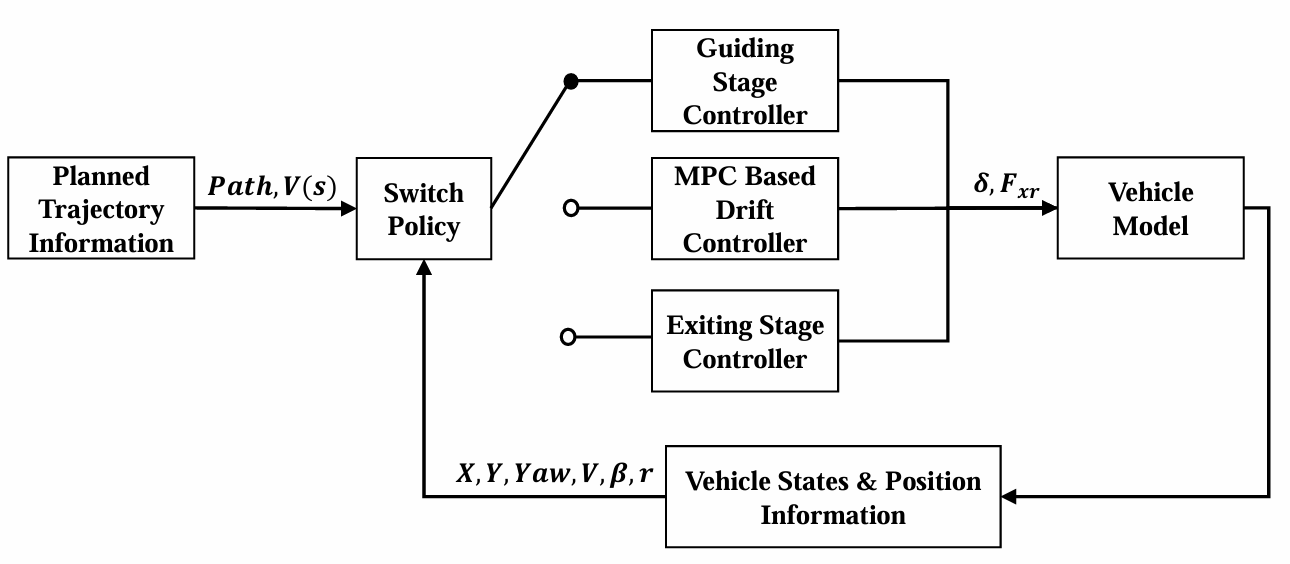
2. The proposed planning algorithm optimizes the global trajectory by iteratively optimizing the curvature. For different local trajectories, corresponding controllers are designed to track reference trajectories, including normal driving conditions and drift conditions.
3. In order to verify the real-time performance of the planning and control method proposed in this paper, we successfully conduct cornering experiments in both simulation environment and on a 1:10 scale car.