Abstract
Slipping may cause a vehicle out of control with serious accident potential. However, a kind of car slipping named “drifting” can be seen in professional contests. So, it is reasonable to apply drift maneuvers in autonomous driving. This article proposes a controller for the particular driving skill—drifting based on MPC(Model Predictive Control). Firstly, we analyze drift cornering mechanisms of the 3-state vehicle model and linearize the model at a drifting equilibrium point to build a fast controller. Then, the predicted lateral errors are brought into the MPC cost function to realize trajectory tracking. The algorithm makes use of the expert strategy in car drifting to adjust the steering angle and longitudinal drive force according to lateral errors during the trajectory following. Finally, it is experimentally verified that the proposed controller can track the reference trajectory in real time while maintaining the drifting state.
Contributions
1. This paper addresses the vehicle control problem of lane keeping under drifting conditions via employing MPC controller.
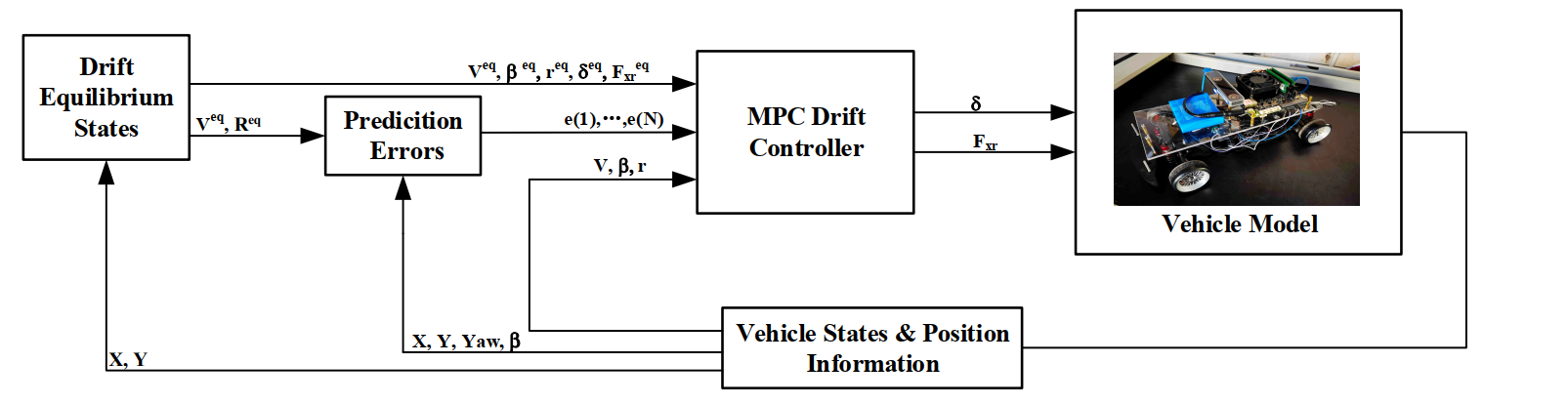
2. The proposed controller integrates the linearized drifting model and the tracking model based on expert strategy. Besides, a real-time algorithm for predicting lateral errors is designed. Finally, the MPC optimization problem is formulated as a QP problem, which is fast enough due to the reduced degree of nonlinearity.
3. To the best of our knowledge, this represents a first successful attempt for using the MPC controller to drift along the trajectory on the 1:10 scale car, which satisfies the onboard computational requirements.