Abstract
The development of autonomous driving has boosted the research on autonomous racing. However, existing local trajectory planning methods have difficulty planning trajectories with optimal velocity profiles at racetracks with sharp corners, thus weakening the performance of autonomous racing. To address this problem, we propose a local trajectory planning method that integrates Velocity Prediction based on Model Predictive Contour Control (VPMPCC). The optimal parameters of VPMPCC are learned through Bayesian Optimization (BO) based on a proposed novel Objective Function adapted to Racing (OFR). Specifically, VPMPCC achieves velocity prediction by encoding the racetrack as a reference velocity profile and incorporating it into the optimization problem. This method optimizes the velocity profile of local trajectories, especially at corners with significant curvature. The proposed OFR balances racing performance with vehicle safety, ensuring safe and efficient BO training. In the simulation, the number of training iterations for OFR-based BO is reduced by 42.86% compared to the state-of-the-art method. The optimal simulation-trained parameters are then applied to a real-world F1TENTH vehicle without retraining. During prolonged racing on a custom-built racetrack featuring significant sharp corners, the mean velocity of VPMPCC reaches 93.18% of the vehicle's handling limits. The released code is available at https://github.com/zhouhengli/VPMPCC.
Contributions
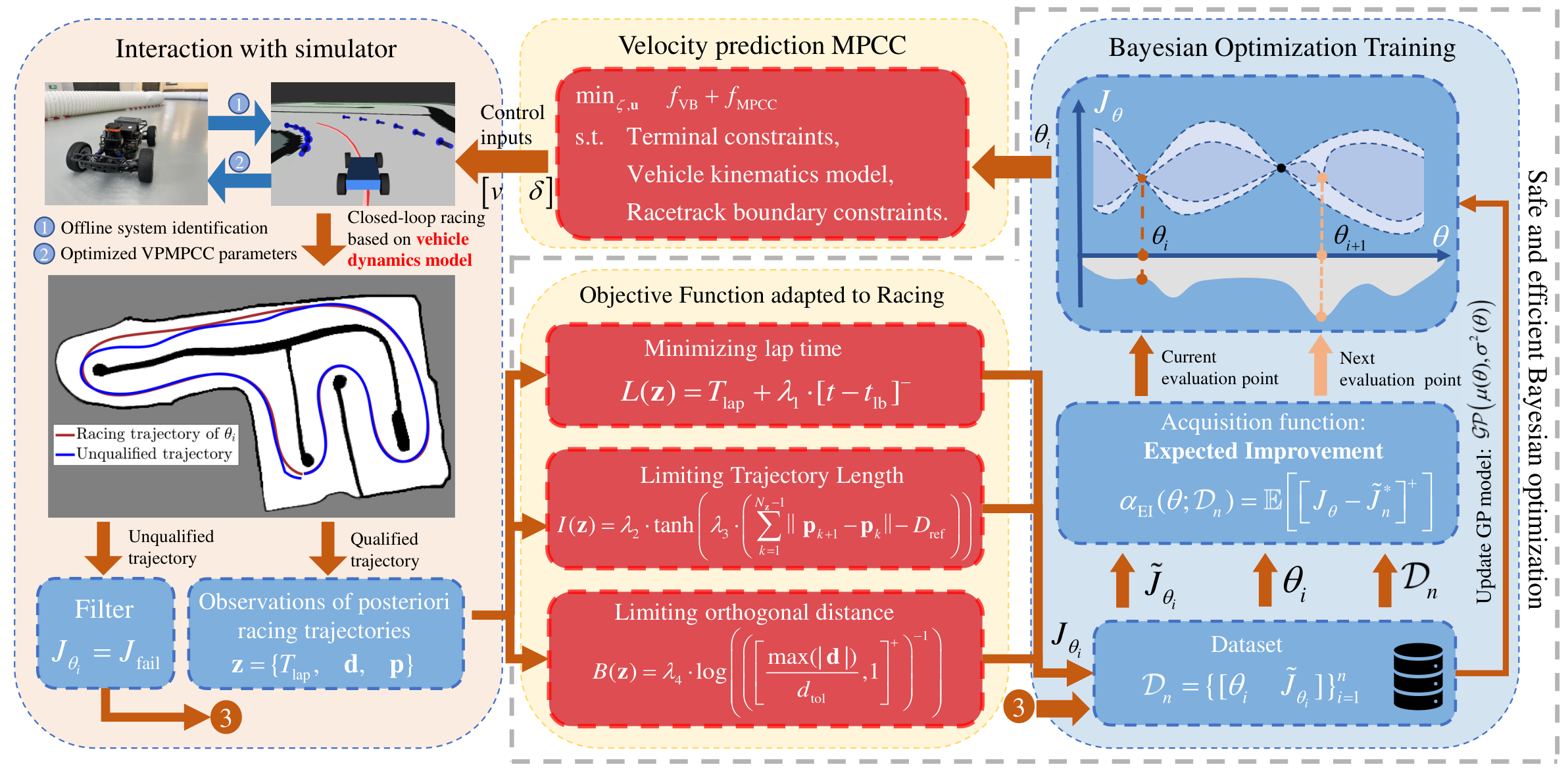
1. An effective method for integrating velocity prediction to efficiently optimize local trajectory velocity profiles. The proposed VPMPCC integrates velocity prediction into trajectory planning by encoding the racetrack as a Reference Velocity Profile (RVP). Velocity prediction is then achieved by matching the planned velocities within the prediction horizon with the corresponding reference velocities in the RVP.
2. An effective OFR accelerates BO to safely learn the optimal parameters of the local trajectory planner. The proposed OFR enhances vehicle safety by limiting racing trajectory deviations significantly from the reference line and reduces the number of iterations required for convergence by applying negative costs to time-reducing trajectories. It improves training efficiency by 42.86%, with optimal simulation parameters transferable to real-world vehicles.
3. A data-driven autonomous racing framework safely pushes the vehicle to its handling limits, validated through well-established and reliable real-world vehicle experiments. The VPMPCC and BO-based autonomous racing framework (VPBO-RF) demonstrates superior performance on a self-built 1:10 scale F1TENTH vehicle, excelling on a challenging racetrack with several sharp corners. Despite limited computational resources and execution delays, the mean velocity of VPMPCC achieved 93.18% of vehicle handling limits, with an efficient mean computation time of 7.04 ms.